
 企业资料通过认证
企业资料通过认证2) 可以使用该类型数据进行机器人home位置的检查
3) 创建homepos位(jointtarget类型)
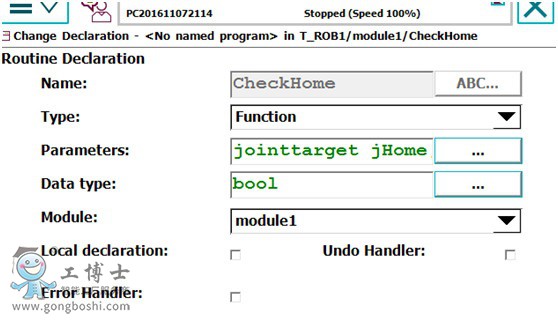
5) 新建routine,类型选择function,datatype选择bool(即返回值为bool)
10) 插入代码如下:
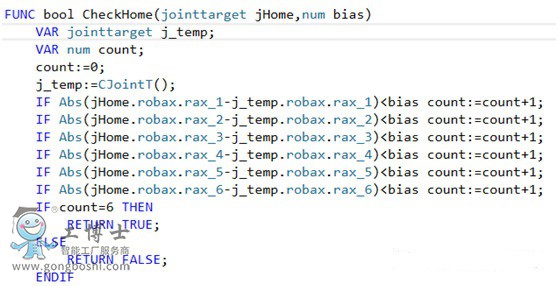
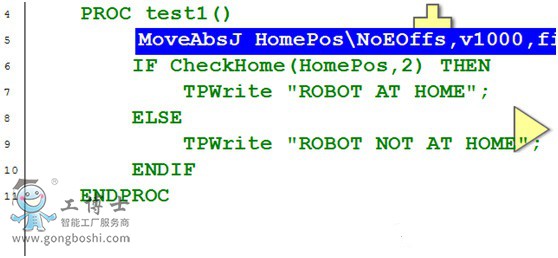
其中Cjoint为读取当前位置的jointtarget值,即当前位置个轴角度编写测试程序如下:
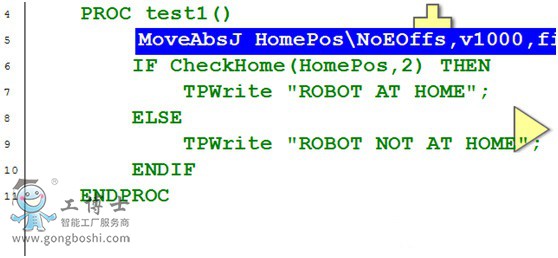
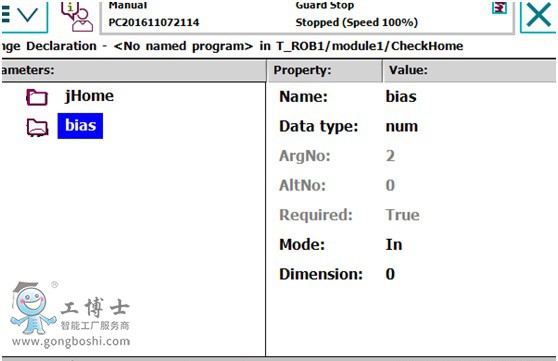
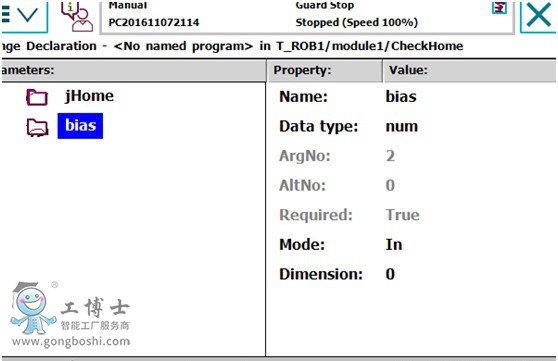
如果在home位置(各轴允许误差为2°),输出robot at home,否则输出 robot NOT at home
联系热线:18616561800 联系人:庾文科 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 ABB机器人配件专营店